Zpracovaní obrazu
- Obrázek je většinou reprezentován maticí, kde daný pixel je na pozici (i, j), jeho hodnota je f(i, j)
- Reprezentace obrazu
- Nejčastěji jas (úrovně šedi)
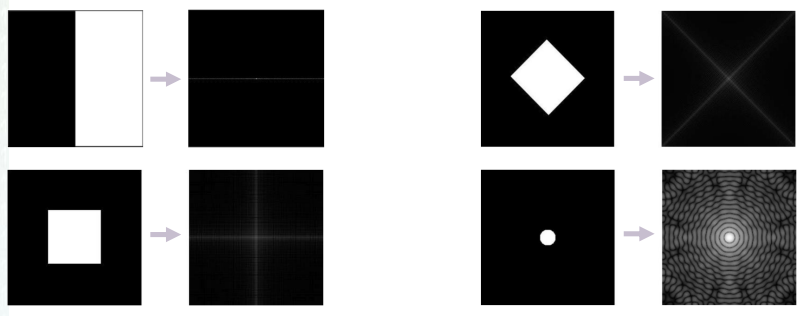
- Fourierova transformace
- Částečné úkoly rozpoznávání
- Zachycení obrázku a digitalizace
- Preprocessing
- Segmentace pozadí a objektů
- Popis objektů
- Pochopení obsahu
- Reprezentace obrazových informací - úrovně
- Matice čísel - jas, grayscale...
- Segmentovaný obraz (hrany a plochy)
- Geometrická reprezentace (znalost 2/3D hran a okolních vlivů - světla atd.)
- Vztahové modely, sémantické sítě, derivace
Preprocessing
- Úkol
- Potlačení šumu
- Odstranění geometrických zkreslení
- Potlačit/zvýraznit sledované featury obrazu
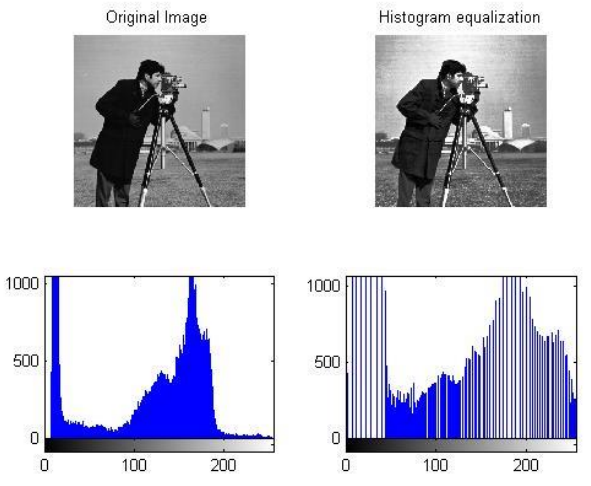
- Slouží k vyrovnání histogramu (histogram equalization)
- Stejná frekvence všech stupňů šedi
- Vylepšení vlastnosti obrazu pro vizuální pozorovaní
- Používá se k zvýšení kontrastu
- Slouží ke korekci zkreslení zařízením
- Akce
- Přiblížení
- Otáčení
- Posouvání
- transformace
- Geometrická ( prostorová ) transformace
- Pokud je známá, aplikujeme inverzní matici
- Jinak hledáme odpovídající ( correspondence ) body a na jejich základě odhadujeme transformaci
- Transformace se často aproximuje pomoci polynomu řádu m
- Polynomiální rovnice
- x'=\sum_{r=0}^m\sum_{k=0}^{m-r}a_{rk}x^ry^k
- y'=\sum_{r=0}^m\sum_{k=0}^{m-r}b_{rk}x^ry^k
- Na základě komplexity se vybere transformační funkce
- Bilinear transformation
- x'=a_0+a_1x+a_2y+a_3xy
- y'=b_0+b_1x+b_2y+b_3xy
- Affine transformation
- x'=a_0+a_1x+a_2y
- y'=b_0+b_1x+b_2y
- Řešení je nalezeno metodou nejmenších čtverců (LSM)
- Po transformaci je nutná grayscale korekce
Filtrace
- K potlačení nechtěných jasných komponent
- Transformuje stupně jasu
- Ve frekvenční doméně (2D Fourierova transformace)
- V prostorové doméně (2D konvoluce, aplikace konvoluční kernel matice)
- Filtrace podle průměru
- Mediánová filtrace
- Zachovává hrany
- Občas ale vytváří nové hrany
- Slouží k odstranění impulzivního šumu
Gradientní metody
- Hledaní ostrých hran
- Zapříčiňuje lepší detekci
- Populární gradientní operátory
- Roberts’ operator
- Aproximace 1. parciální derivace
- Sobel's operator
- Aproximace 1. parciální derivace
- Přesnější než Roberts’ operator
- Laplace's operator
- Aproximace 2. parciální derivace
- Způsobuje duplikaci hran
Detekce hran
LoG filter
- Dobře aproximuje biologickou detekci hran
- Vyhlazeni
- Gaussovský filtr
- Laplaceho filtr
- Hledaní hran
Canny detector
- Požadavky
- Low error rate (nalezení jen a pouze hran)
- Minimalizace vzdáleností hran obrázku a detekovaných hran
- Reprezentace hrany jednou vrstvou pixelů
- Postup
- Nejdříve vyhladí obrázek Gaussovským filtrem
- Edge filtr se použije s rozlišením směru
- Použije se Hysteresis thresholding
- Pokud je pixel nad horním prahem, je to hrana
- Pokud je mezi prahy a je vedle hraničního pixelu, je to hrana taky
- Slouží k určení množiny harmonických funkcí, ze kterých se funkce skládá.
- Neboli snaží se rozložit obrázek na součet sinusových vln
- Proměnné
- Amplituda
- Frekvence
- Posunuti
- Výsledek
- Amplitude spectrum
- Graf zachycující amplitudu ku frekvenci
- Phase spectrum
- Graf zachycující fázový posun ku frekvenci
- Vlastnosti
- Linearita výhodné pro filtraci šumu
- Konvoluce výhodné pro lineární filtraci
- Posun (spektrum se posouvá do středu, při násobení (-1)^{x+y}
- Fast Fourierova transformace
- Efektivní implementace Fourierovy transformace
- Funguje na principu rekurzivním rozdelovanim dat
- Pokud existuje hrana tak se zobrazí jako kolmice na danou hranu