Segmentace-obrazu
Segmentace obrazu
Segmentace obrazu na základě oblastí
Rozdělení obrazu na (nepřekrývající se) oblasti které úzce souvisejí s předměty nebo jejich částmi reálný svět
Realizováno na základě homogenity oblasti (např. stejná barva, úroveň jasu)
Single thresholding
Sedý obrázek rozdělen konvertován do binárního podle prahu na černé a bile
Na základě nastaveného thresholdu se pixely klasifikují na základě úrovni šedi do 2 tříd
Může najít “neviditelné” objekty
Nevhodné pro více objektů, kalkulaci velikosti, atd…
Double thresholding
Varianta single tresholding máme dva prahy
Pokud je hodnota pixelu mezi prahovými hodnotami T1 a T2(T1 < T2), pak (ve výsledném binárním obrázku) má pixel hodnotu odpovídající bílé barvě, jinak má hodnotu odpovídající černé barvě
Použiti
Otsu’s method
Metoda pro najiti správného tresholdu
Maximalizuje mezi-/vnitrotřídní rozptyl
Optimální kritérium thresholdu = maximum kriteriální funkce (rozptylu), prohledává se celý stav. prostor
Adaptive thresholding
Metoda kdy jednoduche treshold metody nefunguji.
Obraz naseká na stejně velké kusy a použije jednoduchou segmentaci pro samostatný nasekaný díl
Segmentace s prahem (prahy) nemusí být vždy úspěšna. Například pokud se mění pozadí (např. vlivem světla)
Watershed segmentation
Založeno na myšlence vodních hrází
Obrázek bereme jako topografickou mapu shora, kterou “zaplavujeme vodou”
Pokud hrozí, že se jezera spojí, postavíme na tom místě hráz
Až všechno přelijeme, zůstanou nám hráze, ohraničující vysegmentované objekty
Citlivé na šum (doporučuje se předzaplavit určitá místa)
Mean shift segmentation
Založeno na mean shift filtrování
Časově náročné, ale dobré výsledky
Převede 2D do 3D, kde 3. dim = intenzita pixelu, vytvoří se tím shluky podobné intenzity (= stejný objekt)
Udělá se koule kolem bodu, který chceme vysegmentovat a iterativně posunujeme jeho střed do těžiště. Původní hodnotu pixelu nahradíme hodnotou na místě, kde se koule zastavila. Opakuj pro všechny pixely. Tím se vysegmentují objekty (na základě barvy/intenzity)
Reprezentace zpracovaní obrazu
Reprezentace hranic
Aproximace hranic přímkou (nebo jinou křivkou)
Fourier descriptors
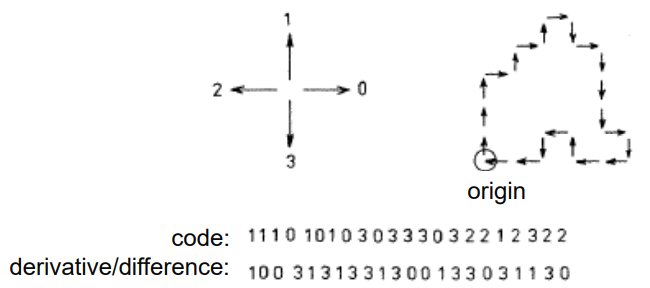
Řetězec kódů (šipky podle světových stran mají číslo, hranice objektu je číslo)
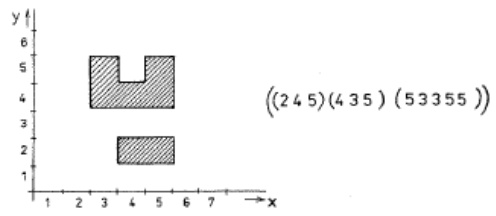
Reprezentace oblastí
Různé regiony mají různá čísla
List listů
Vnitřní list obsahuje řádek a interval odkud kam je daná oblast ve sloupcích)
Kostra oblasti
Každá “kost” nese informaci o minimální vzdálenosti na hranici
Používá se třeba pro zpracovaní textu
Simple shape properties
Velikost objektu: počet pixelů v objektu
Průměrný jas a rozptyl
Eccentricity
Longitude: poměr mezi délkou a šířkou obdélníku, který objekt ohraničuje
Rectangularity
Směr a rovnost čar
Nekompaktnost (NC = B^2/V, B = obvod, V = obsah)
Nalezení textur
Výpočet oblastí (lepší pro pro velké textury, např. cihly)
Výpočet hran (lepší pro drobné textury, např. plástev)
Trackování objektů
Podle změn mezi dvěma obrázky