5. Pokročilé paralelní algoritmy
15. Základní Principy Paralelizace QuickSortu a Paralelního Rozdělení v OpenMP¶
QuickSort je algoritmus řazení s průměrnou časovou složitostí O(n\cdot log(n)). Funguje tak, že vybere 'pivot' prvek a rozdělí pole na dvě podpole, takže prvky menší než pivot jsou před ním a prvky větší než pivot za ním. Tato podpole jsou pak rekurzivně seřazena.

Základní Paralelizace Pomocí Úloh - O(n * log(n) / p)¶
- Základní myšlenka paralelizace QuickSortu spočívá v provádění rekurzivních volání na levé a pravé části paralelně.
- Toho lze dosáhnout pomocí OpenMP direktivy
#pragma omp taskpro levou a pravou část. - Avšak tato naivní metoda může být pomalá kvůli režii vytváření úloh a čekání na dokončení podvláken.
void parallel_quicksort(int* arr, long low, long high) { #pragma omp parallel // Create a team of threads { #pragma omp single // Only a single thread executes the recursive calls { parallel_quicksort_recursive(arr, low, high); } } } void parallel_quicksort_recursive(int* arr, long low, long high) { if (low < high) { long pivotIndex = partition(arr, low, high); #pragma omp task // Recursive call as a separate task, can be executed by different threads parallel_quicksort_recursive(arr, low, pivotIndex - 1); #pragma omp task // Recursive call as a separate task, can be executed by different threads parallel_quicksort_recursive(arr, pivotIndex + 1, high); } }
Vylepšená Paralelizace Pomocí Úloh¶
- Prah počtu úloh: Použijte direktivu
#pragma omp task if(depth < DEPTH_THRESHOLD)k nastavení prahu pro hloubku rekurze, do které by měly být vytvářeny úlohy. - Nahrazení jednoho z rekurzivních volání iterací: Tímto lze snížit počet vytvořených úloh na polovinu.
- Vyvažování Zátěže: Rozdělte vlákna mezi levé a pravé části podle jejich velikosti.
- Paralelní Rozdělení: Kromě paralelního řazení také paralelizujte fázi rozdělení.
const int DEPTH_THRESHOLD = 4; void parallel_quicksort(int* arr, long low, long high) { #pragma omp parallel // Create a team of threads { #pragma omp single // Only a single thread executes the recursive calls par_quicksort_rec(arr, low, high, 0); } } void par_quicksort_rec(int* arr, long low, long high, int depth) { while (low < high) { long pivotIndex = partition(arr, low, high); #pragma omp task if (depth < DEPTH_THRESHOLD) // Limit the depth of recursion for task creation par_quicksort_rec(arr, low, pivotIndex - 1, depth + 1); // Using iteration instead of recursion for the right part depth += 1 low = pivotIndex + 1; } }
Hoareuv QuickSort¶
- Vybere pivotní prvek, často první nebo poslední prvek v podpoli.
- Má dva ukazatele - jeden na začátku pole a druhý na konci.
- Ukazatele se pohybují proti sobě. Levý ukazatel postupuje doprava, dokud nenajde prvek větší než pivot. Pravý ukazatel postupuje doleva, dokud nenajde prvek menší než pivot.
- Pokud se ukazatele ještě nepřekřížily, prohodí nalezené prvky a pokračují v krocích 3 a 4.
- Proces končí, když se ukazatele překříží. Pole je pak rozděleno na dva segmenty, prvky menší než pivot a prvky větší než pivot.
Paralelní Rozdělení pomoci Hoareova QuickSortu¶
- Tento algoritmus vyžaduje aktivovaný vnořený (= nested) OpenMP paralelizmus
- Tedy v paralelním regionu, který provádí sekvenčně P vláken najednou, se jedno vlákno může opět rozdělit na více vláken.
- Zavolá se:
omp_set_nested(1);coz zapne vnořený paralelizmus
- Níže uvedený kód ukazuje, že Hoareův quicksort se liší pouze výpočtem partition který je nyní paralelizovatelný.
const int DEPTH_THRESHOLD = 4; void parallel_quicksort(int* arr, long low, long high) { omp_set_nested(1); //1 = true #pragma omp parallel // Create a team of threads { #pragma omp single // Only a single thread executes the recursive calls par_quicksort_rec(arr, low, high, 0); } } void par_quicksort_rec(int* arr, long low, long high, int depth) { while (low < high) { long r = par_partition(A, lo, hi); //nested parallelism #pragma omp task if (depth < DEPTH_THRESHOLD) // Limit the depth of recursion for task creation par_quicksort_rec(arr, low, pivotIndex - 1, depth + 1); // Using iteration instead of recursion for the right part depth += 1 low = pivotIndex + 1; } }
Hoareho Paralelní Algoritmus Rozdělení¶
- Máme dva ukazatele, které se pohybují proti sobě.
- Pozice těchto ukazatelů lze upravit pomocí
#pragma omp atomic capture. - Na konci mohou zůstat „špinavá čísla“ (prvky v nesprávné části), která je potřeba přehodit sekvenčně.
- Maximálně můžu získat p špinavých bloků, tedy tolik špinavých bloků, kolik je počet vláken.
- Nakonec projedu pole sekvenčně, abych opravil špinavé bloky.
- Nevyhody:
- Vysoký Počet Synchronizačních Operací
- False sharing
- Vyvažování Zátěže
Vylepšený Paralelní Algoritmus Rozdělení v Hoareově QuickSortu¶
Vylepšený paralelní algoritmus rozdělení v Hoareově QuickSortu se zaměřuje na efektivní paralelizaci fáze rozdělení. Tato fáze je kritická, protože určuje, jak se prvky rozdělí kolem vybraného pivotu. Vylepšená verze se snaží minimalizovat počet špinavých bloků a maximalizovat efektivitu paralelního zpracování.
Následující kroky popisují, jak vylepšený paralelní algoritmus rozdělení funguje:
-
Inicializace: V algoritmu se vybere pivot, podobně jako v klasickém Hoareově algoritmu. Algoritmus také inicializuje ukazatele, které budou procházet polem od obou konců. Na rozdíl od klasického přístupu, vylepšená verze rozdělí data do bloků, které budou zpracovávány paralelně.
-
Paralelní Zpracování Bloků: Každé vlákno zpracovává blok prvků a porovnává je s pivotem. Podle porovnání zařadí prvky za sebe, tj. prvky menší než pivot umisťuje na jednu stranu a prvky větší než pivot na druhou stranu ve svém bloku. Důležité je, že každý blok je zpracováván sekvenčně a nejsou zde použity žádné zámky, což minimalizuje režii synchronizace.
-
Pohyb Ukazatelů a Kontinuální Zpracování Bloků: Základní myšlenka s ukazateli zůstává stejná jako v klasickém Hoareově algoritmu, ale místo přepínání vláken po každém prvku se ukazatele pohybují po zpracovaných blocích. Pokud je zpracován levý blok, ukazatel vezme další levý blok a pokračuje v jeho zpracování zatimco pravy blok pokracuje tam kde zkoncil. Tento princip platí i naopak pro pravý ukazatel. Tato technika snižuje počet nutných synchronizačních operací mezi vlákny a zlepšuje výkon.
-
Oprava Špinavých Bloků: Po dokončení paralelního kroku mohou existovat p špinavých bloků, což jsou bloky, které obsahují prvky, které ještě nebyly správně rozděleny (některé by mohly být menší a jiné větší než pivot). Tento krok spočívá v sekvenčním seřazení těchto špinavých bloků, aby bylo zajištěno, že pole je správně rozděleno kolem pivotu.
Tímto způsobem, vylepšený paralelní algoritmus rozdělení může efektivně využívat paralelní zpracování, zejména pro velké datasety, a minimalizovat počet synchronizačních operací a špinavých bloků.
- Nevyhody:
- Vyvažování Zátěže


const long K = ...; // Definujte hodnotu K
long par_partition_block(int* A, long lo, long hi) {
long pivot = A[hi];
long i = lo;
long j = hi - 1;
#pragma omp parallel
{
long my_i, my_j, init_my_i, init_my_j;
#pragma omp atomic capture
{
my_i = i;
i += K;
}
#pragma omp atomic capture
{
my_j = j;
j -= K;
}
init_my_i = my_i;
init_my_j = my_j;
while (my_i < my_j) {
// Předpokládám, že funkce 'neutralizace' je někde definována
neutralizace(A, my_i, init_my_i, my_j, init_my_j, K, pivot);
if (my_i >= init_my_i + K) {
#pragma omp atomic capture
{
my_i = i;
i += K;
}
init_my_i = my_i;
}
if (my_j <= init_my_j - K) {
#pragma omp atomic capture
{
my_j = j;
j -= K;
}
init_my_j = my_j;
}
}
#pragma omp barrier
// ...neutralizace max. p zbývajících bloků
}
// ...úklid posledního špinavého bloku
return j; //vrácení indexu hranice mezi levým a pravým segmentem
}
Vyvažování¶
- Paralelní rozdělování (neutralizace) je hlavní výpočetní složkou QuickSortu, zbytek je nastavování ukazatelů a krátký epilog.
- QuickSort je datově citlivý: Poměr velikosti levé a pravé části pro další úroveň rekurze závisí na kvalitě výběru pivota.
- Je-li např. poměr velikosti levé a pravé části 2:5, bylo by ideální přidělit vlákna pro provádění vnořených paralelních regionů (klauzulí
num_threadsdirektivy#pragma omp parallel) paralelního rozdělení přibližně v takovém poměru. - Každé z obou částí je ale současně třeba přidělit aspoň 1 vlákno, ať je ta část sebekratší (třeba 5 čísel).
16. Základní myšlenky paralelizace MergeSortu a paralelního dvoucestného sloučení v OpenMP¶
MergeSort¶
Merge Sort, neboli algoritmus řazení sléváním, je jeden z klasických algoritmů pro řazení dat. Merge sort pracuje na principu "rozlož a panuj".
Nejprve rekurzivně rozděluje pole až na jednotlivé prvky, poté postupně slučuje sousední podpole, přičemž je seřazuje. Tento proces pokračuje, dokud nejsou všechna podpole spojena do jednoho seřazeného celku.
Základní Princip: - Rozdělení pole na dvě menší podčásti - Seřazení těchto podčástí - Sloučení těchto dvou seřazených polí do jednoho seřazeného pole
Základní Task Paralelizace¶
Zde využijeme OpenMP k vytvoření úloh (tasks) pro levou a pravou část pole.
#pragma omp task
// recursive call to sort the left part
#pragma omp task
// recursive call to sort the right part
#pragma omp taskwait
// merge the sorted parts
Problém: Pokud rozdělíme pole na příliš mnoho malých částí, vznikne falešné sdílení (false sharing) a vysoká režie pro správu úloh, což degraduje výkon.
Vylepšená Task Paralelizace¶
- Prah počtu úloh: Použití podmínky pro omezení hloubky rekurze.
#pragma omp task if(depth < DEPTH_THRESHOLD)
-
Snížení počtu úloh: Nahrazení jednoho rekurzivního volání iterací. To snižuje počet úloh na polovinu.
-
Paralelizace slučovací operace: Kromě paralelního řazení je také možné paralelizovat slučovací operaci. To zrychluje celkový proces.
Paralelní Dvoucestné Slučování¶
Paralelní dvoucestné slučování je technika optimalizace slučovací fáze Merge Sort algoritmu, když pracujeme s více procesorovými vlákny.
Krok 1: Vytvoření Matice Přechodů¶
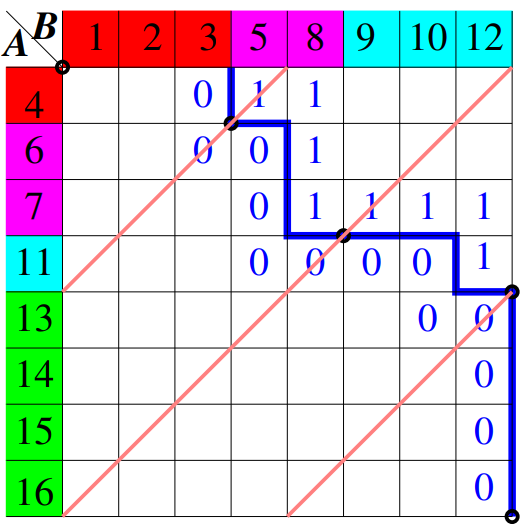
Máme dvě seřazená pole, A a B. Naším cílem je sloučit tato dvě pole do jednoho seřazeného pole C. Nejprve si sekvenčně vytvoříme matici X, kde každý prvek X[i][j] je 0, pokud A[i] > B[j], a 1 v opačném případě. Protože pole jsou seřazená, bude existovat přechod mezi hodnotami 0 a 1 v této matici.
Krok 2: Diagonální Proložení¶
Nyní chceme rozdělit práci mezi více vlákny. K tomu použijeme techniku nazývanou diagonální proložení. Proložíme matici X s (p-1) vedlejšími diagonálami, kde p je počet vláken, které chceme použít. Tyto diagonály jsou ekvidistantní a rozdělují matici do bloků.
Krok 3: Výpočet Průsečíků¶
Pro každou diagonálu potřebujeme najít průsečík s přechodem mezi hodnotami 0 a 1 v matici. To nám pomůže určit, jaká část pole A a B by měla být sloučena daným vláknem. Průsečíky lze najít pomocí binárního půlení, což je efektivní metoda s časovou složitostí O(\log n).
Krok 4: Sloučení Bloků¶
Nyní každé vlákno provede slučovací operaci sekvenčně na svých přidělených blocích. To znamená, že vlákno i sloučí bloky A_i a B_i na základě vypočtených průsečíků.
Krok 5: Spojení Výsledků¶
Na konci, po dokončení slučovací operace ve všech vláknech, spojíme výsledné bloky od všech vláken k vytvoření finálního seřazeného pole C.
Pozor na False Sharing¶
Ačkoliv paralelní dvoucestné slučování může výrazně zvýšit rychlost, může docházet k falešnému sdílení, což znamená, že více vláken může současně přistupovat k datům, která jsou blízko sebe v paměti. To může způsobit, že vlákna si navzájem přepisují data a může dojít k poklesu výkonu. V takových případech může být užitečné použít alternativní techniky jako například p-cestné paralelní slučování.
17. Základní myšlenky paralelního p-cestného MergeSortu v OpenMP¶
Úvod¶
Paralelní p-cestne slucovani v MergeSortu je varianta klasického MergeSort algoritmu, která efektivně rozděluje práci na slucovani mezi více vlákny.
Paralelní p-cestný MergeSort¶
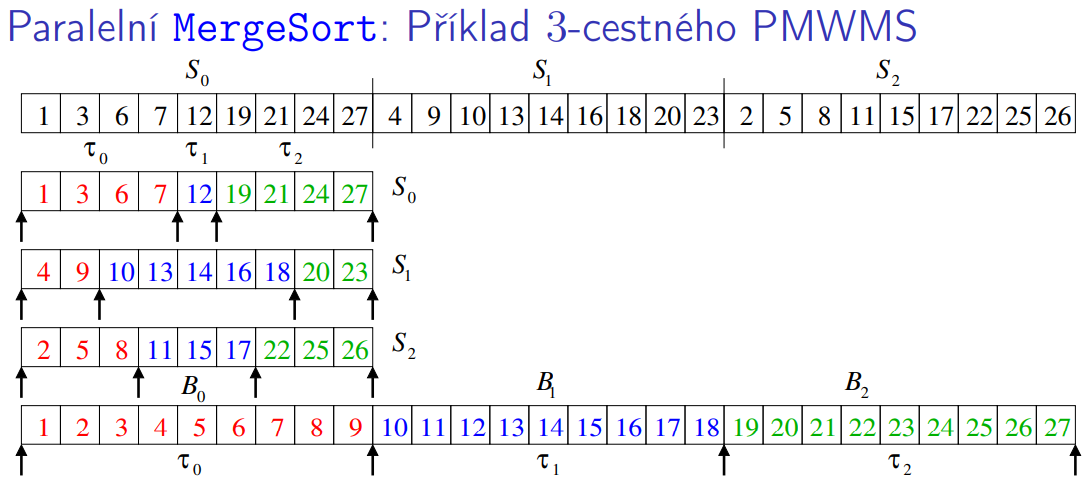
Krok 1: Rozdělení dat na podčásti¶
- Příprava: Máme vstupní pole S o velikosti n a chceme ho rozdělit na p podpolí, kde p je počet dostupných vláken. Každé podpole bude mít velikost přibližně n/p.
- Rozdělení: To znamená, že rozdělíme pole S na menší podpolí S[0], S[1], ..., S[p-1].
Krok 2: Seřazení podčástí¶
- Paralelní seřazení: Každé vlákno je zodpovědné za seřazení jednoho z podpolí. To znamená, že vlákno i bude seřazovat podpole S[i].
- Potom nasleduje bariera.
Krok 3: Výpočet oddělovačů¶
- Určení oddělovačů: Po seřazení podčástí potřebujeme určit oddelovace. Každé vlákno potrebuje najit takovy oddelovac ktery kdyz aplikuje na serazene podcasti tak ten pivot bude odelovat cisla tak aby pred pivotem bylo \text{id} * (n/p) cisel.
- Význam oddělovačů: Oddělovače nám pomohou určit, jaké části různých podpolí se mají sloučit do jednoho kontinuálního seřazeného segmentu.
Krok 4: Sloučení úseků¶
- Paralelní sloučení: Vlákna nyní začnou slučovat části, které jim byly přiděleny na základě oddělovačů. To je provedeno tak, že každé vlákno sloučí své příslušné úseky do jednoho kontinuálního seřazeného segmentu .
- Slučovací algoritmus: Slučování může být provedeno pomocí standardního sekvencniho slučovacího algoritmu, který spojuje p seřazenych seznamu do jednoho seřazeného seznamu.
Krok 5: Konečná synchronizace¶
- Po dokončení slučovacích operací všech vláken, budeme mít p seřazených segmentů. Tyto segmenty potom můžeme ještě jednou sloučit do jednoho výsledného seřazeného pole.
- Je důležité zajistit, že vlákna jsou synchronizovaná před tímto krokem, aby se zabránilo jakýmkoli problémům s přístupem k datům.
Poznámka: Po seřazení jednotlivých částí a výpočtu oddělovačů musí být bariéry, aby bylo zajištěno, že všechna vlákna dokončila svou práci předtím, než se začne sloučování.
#pragma omp parallel num_threads(NUM_THREADS)
{
// Rozdělení a seřazení podčástí
// ...
#pragma omp barrier // Synchronizace vláken
// Výpočet oddělovačů
// ...
#pragma omp barrier // Synchronizace vláken
// Sloučení úseků
// ...
}
// Konečná synchronizace a slučování segmentů
Asymptotický Odhad Paralelního Času¶
Asymptotický odhad paralelního času T(p, n) je:
- První část vyjadřuje sekvenční řazení \frac{n}{p} čísel.
- Druhá část je čas potřebný pro log(n) provedení p hledání v polích velikosti \frac{n}{p}.
- Třetí část je sekvenční p-cestné slučování p polí celkové délky \frac{n}{p}.