Lineární model a základní značení
Uvod¶
Linearni model:
Zavedeme X_0=x_0=1 a vektorove znaceni:
Muzeme psat:
Ted vezmeme nahodnym vyberem x_1,...x_n muzeme pak psat:
A ve forme matice to je:
Znaceni pro jednotkovou matici N \times N je: I_N Rozptyl se znaci: \omega^2
Residuální suma čtverců¶
Definice Hledáme tedy: Po zderivovaní a zderivovaní podruhé získáme vztah a hesian, z nich dokážeme ukázat ze Hesian je pozitivně definitní a jakýkoliv kritický bod je globálním minimem RSS. Z toho nam vypadne ze nutnou podminkou minima je platnost vztahu který bývá nazýván normální rovnice: Předpokládejme nyní, že matice X^TX je regulární. V takovém případě dostaneme jednoznačné řešení: Muzeme oznacit matici P jako:
Statistické vlastnosti odhadu vektorů vah v lineární regresi¶
Předpokládá se, že data pocházejí z určitého modelu a že máme nějaké předpoklady o chybě \varepsilon, konkrétně že E \varepsilon = 0. Z toho plyne, že očekávaná hodnota Y je E Y = Xw.
Nestranný odhad¶
Věta 1.1 nám říká, že odhad \hat{w} získaný metodou nejmenších čtverců je za předpokladu E \varepsilon = 0 nestranný, což znamená, že E \hat{w} = w. To lze dokázat následujícím způsobem:
Variance odhadu (σ^2)¶
Pokud předpokládáme, že chyby \varepsilon_i v jednotlivých bodech x_i jsou nekorelované veličiny se stejným rozptylem \sigma^2 plyne, že varY = \sigma^2 I_N
( Vsuvka k důkazu: var\ (BX)=B\ var(X)\ B^T )
Věta 1.2 říká, že za předpokladu E \varepsilon = 0 a var \varepsilon = \sigma^2 I_N platí var \hat{w} = \sigma^2 (X^TX)^{-1}. To lze dokázat tak, že použijeme vlastnosti variancí a symetrie matice (X^TX) a její inverze:
Nestrannost odhadu (σ^2)¶
Věta 1.3 je o tom, že pokud předpokládáme, že chyba \varepsilon je centrálně rozdělena se střední hodnotou E \varepsilon = 0 a variance var \varepsilon = \sigma^2 I, pak s^2 = \frac{RSS(\hat{w})}{(N - p - 1)} je nestranný odhad \sigma^2
( Vsuvka k důkazu definice stopa matice:
- tr\ (A)=\sum_ia_{i,i} )
- tr(AB)=tr(BA)
- tr(ABC)=tr(CAB)=tr(BAC)
)
Důkaz:
- Začneme s výpočtem střední hodnoty reziduálního součtu čtverců (RSS):
- E RSS(\hat{w}) = E Y^T(I_N - P)Y.
- Přeskupíme termíny pomocí vlastností stopy matice :
- E Tr Y^T(I_N - P)Y = Tr (I_N - P) E Y Y^T.
- Využijeme faktu ze E Y Y^T = varY+EY(EY)^T a použijeme lineární vlastnosti očekávané hodnoty a variance:
- Tr (I_N - P) E Y Y^T = Tr (I_N - P)σ^2 I_N.
- Nakonec spočítáme stopu pomocí vztahu pro jednotkovou matici:
- σ^2 Tr (I_N - P) = σ^2 (N - p - 1). odtud plyne, že E[s^2] = \sigma^2, tedy s^2 je nestranný odhad \sigma^2.
Gauss-Markov theorem¶
Gauss-Markovova věta: Použitím metody nejmenších čtverců pro odhad vektoru vah \hat{w} získáme "nejlepší" nestranný odhad w v lineárním modelu v Y. Pro jakýkoliv vektor c v \mathbb{R}^{N}, odhad c^{T} \hat{w} bude mít menší nebo rovno variabilitu (rozptyl) než jakýkoli jiný nestranný odhad d^{T}Y, pro jakýkoliv vektor d v \mathbb{R}^{N}. Tedy: var(c^{T} \hat{w}) \leq var(d^{T}Y)
Důkaz:
- Začínáme s identitou c^{T} \hat{w} = c^{T}(X^{T}X)^{-1}X^{T}X\hat{w} = c^{T}(X^{T}X)^{-1}X^{T}\hat{w}
- Přejmenováním a = c^{T}(X^{T}X)^{-1}X^{T}, z lemma (1.4) dostáváme, že a^{T}X\hat{w} je nejlepší nestranný lineární v Y odhad a^{T}Xw = c^{T}(X^{T}X)^{-1}X^{T}Xw = c^{T} w.
Testy hypotéz o složkách vektoru vah v lineární regresi, pásy spolehlivosti¶
Testování hypotéz o složkách vektoru vah v lineární regresi¶
Předpokládejme, že máme vektor náhodných odchylek ε s N-rozměrným normálním rozdělením, kde střední hodnota je nulová E \varepsilon = 0 a varianční matice je var\ \varepsilon = \sigma^2I. Toto nám dává rozdělení pro vysvětlované proměnné Y jako Y \sim N(Xw, \sigma^2I_N).
Pod tímto předpokladem, můžeme představit následující věty a důsledky:
Rozdělení Odhadovaných Vah (Věta 1.11)¶
Jestliže \varepsilon \sim N(0, \sigma^2I), pak \hat{w} \sim N(w, \sigma^2(X^TX)^{−1}). Tento výsledek je způsoben invariancí normálního rozdělení vůči lineárním transformacím. To znamená, že distribuce odhadovaných vah je normální s daným středem a variancí.
Rozdělení Reziduálního Součtu Čtverců (Věta 1.12)¶
Pokud \varepsilon \sim N(0, \sigma^2I), pak RSS(\hat{w})/\sigma^2 \sim \chi^2_{N−p−1}. Tato věta se používá k popisu rozdělení reziduálního součtu čtverců RSS(\hat{w}) a také k odhadu \sigma^2. Rozdělení \chi^2_{N−p−1} je chi-kvadrát rozdělení s N-p-1 stupni volnosti.
Testování Hypotéz o Váhách (Věta 1.13)¶
Pod předpokladem, že \varepsilon \sim N(0, \sigma^2I), pro každé c \in \mathbb{R}^{p+1} platí, že kde s^2 = RSS(wˆ)/(N−p−1). Toto je tzv. t-statistika, kterou používáme k testování hypotéz o vahách v lineárním regresním modelu.
Testování Hypotéz pro Jednotlivé Váhy (Důsledek 1.14)¶
Za předpokladu, že \varepsilon \sim N(0, \sigma^2I), pro každé i = 1, ..., p + 1 platí kde s^2 = RSS(\hat{w})/(N−p−1) a v_{ii} je i-tá diagonální složka matice (X^TX)^−1.
Tyto věty nám umožňují testovat hypotézy o hodnotách jednotlivých složek vektoru w, stejně jako hypotézy o liniích složek vektoru w. Můžeme také konstruovat intervaly spolehlivosti pro tyto hodnoty a linie.
Pásy spolehlivosti a predikční interval¶
V lineární regresi často potřebujeme odhadnout, jak přesné jsou naše předpovědi. K tomu můžeme použít pásy spolehlivosti a predikční intervaly.
Výchozí model¶
Začneme s výchozím modelem, ve kterém máme libovolný bod x_0 z prostoru příznaků \mathbb{R}^{p+1}. Vysvětlovaná proměnná Y_0 v tomto bodě je určena vztahem kde E\ \varepsilon_0 = 0 a \text{var}\ \varepsilon_0 = \sigma^2. To znamená, že hodnota Y_0 je dána lineární kombinací příznaků x_0 s koeficienty w, plus nějaká náhodná chyba \varepsilon_0.
Odhad hodnoty regresní přímky¶
Hodnotu regresní přímky v bodě x_0 označujeme E Y_0 = x_0^T w a odhadujeme ji pomocí \hat{Y}_0 = x_0^T \hat{w}, což je nestranný bodový odhad E Y_0. Z důsledku věty 1.1 totiž platí
Nyní předpokládáme, že \varepsilon_0 \sim N(0, \sigma^2). Z věty 1.13 plyne, že standardizovaná chyba následují studentovo t-rozdělení s (N−p−1) stupni volnosti
Interval spolehlivosti pro hodnotu regresní přímky¶
V případě, že chyby \varepsilon_0 jsou normálně rozdělené (\varepsilon_0 \sim N(0, \sigma^2)), můžeme použít větu 1.13 k určení intervalu spolehlivosti pro hodnotu regresní přímky E Y_0 v bodě x_0. Z toho plyne:
Z toho následuje interval spolehlivosti:
Toto je tedy (1 - α)% interval spolehlivosti pro hodnotu regresní přímky E Y_0 v bodě x_0.
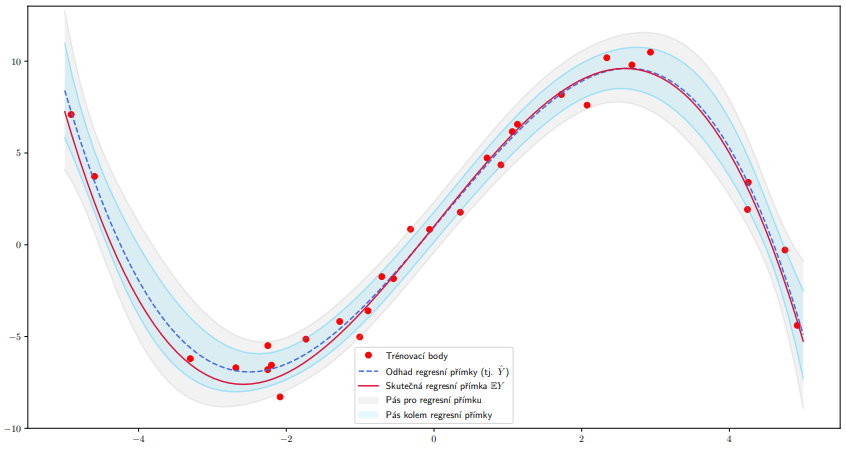
Pás spolehlivosti pro regresní přímku¶
Pokud chceme získat pás spolehlivosti, který platí ve všech bodech současně, tzv. pás spolehlivosti pro regresní přímku, musíme využít sofistikovanějšího přístupu pomocí Scheffého S-metody. Výsledkem je pás spolehlivosti určený v bodě x_0 intervalem
který platí pro všechny body x_0 současně. To znamená, že celá regresní přímka je obsažena v pásu určeném tímto intervalem s pravděpodobností 1 - α.
Odhad hodnoty náhodné veličiny Y_0¶
Střední hodnotu náhodné veličiny Y_0 bodově odhadujeme pomocí \hat{Y}_0 = x_0^T \hat{w} a intervalově pomocí intervalu z předchozí části. Nyní se zabývejme přímo hodnotou náhodné veličiny Y_0.
Číselným odhadem této hodnoty je samozřejmě opět \hat{Y}_0 = x_0^T \hat{w} . Sestrojme nyní interval předpokládaného výskytu, tj. interval, který pokrývá Y_0 s předem danou pravděpodobností 1 - α.
Předpokládejme, že v bodě x_0 opět platí Y_0 = x_0^T w + \varepsilon_0.
Interval pokrývající Y_0¶
Pro rozdíl \hat{Y}_0 - Y_0 platí \hat{Y}_0 - Y_0 \sim N \left(0, \sigma^2 (x_0^T (X^TX)^{-1}x_0 + 1)\right). Analogickým postupem jako v důkazu věty 1.13 dostáváme
Nyní již stejným postupem jako u intervalu spolehlivosti pro E Y_0 zjistíme, že interval pokrývající Y_0 s pravděpodobností 1 - α je